





















Introduction
Robotics is a multidisciplinary field that combines engineering, computer science, and artificial intelligence (AI) to design, build, and operate robots. These machines are designed to perform tasks autonomously or semi-autonomously, often in environments that are hazardous or challenging for humans. Robotics has become an integral part of various industries, including manufacturing, healthcare, agriculture, and logistics, among others.
As technology continues to advance, the capabilities of robots are expanding, enabling them to take on more complex tasks and work alongside humans in increasingly sophisticated ways. This article will delve into the engineering aspects of robotics, exploring the different types of robots, their components, control systems, programming, applications, and future trends. Before we dive into the intricacies of modern robotic technology, it’s essential to trace back the roots of this transformative field, understanding the critical milestones and innovations that have shaped it over time.
The History of Robotics
The journey towards modern robotics has been a long and winding one, starting as far back as ancient times and developing over centuries into the diverse and sophisticated field we know today.
Ancient Automatons
Though not ‘robots’ in the modern sense, automatons—mechanical devices built to mimic the movement of humans or animals—have been around since ancient times. Greek engineer Hero of Alexandria designed many such devices in the 1st century AD, often using steam power to make them move. These early inventions set the foundation for mechanical engineering, influencing the future development of robotics.
Industrial Revolution
The advent of the Industrial Revolution in the 18th and 19th centuries saw an exponential increase in machinery designed to automate tasks.[3] The Jacquard loom, for example, used a series of punch cards to control the creation of intricate fabric patterns, a precursor to modern programming techniques.
Early 20th Century
The word ‘robot’ was coined in the 1920 play “R.U.R.” (Rossum’s Universal Robots) by Czech writer Karel Čapek.[4] The story introduced the idea of artificially created workers, ushering in a new era of imagination and creativity around automation.
In the 1930s and 1940s, early humanoid robots, like Westinghouse Electric’s Elektro, were developed. These creations demonstrated the increasing capability to automate human-like functions.[5]
As the field of robotics developed, these mechatronic marvels began permeating mainstream media and popular culture, capturing the imagination of audiences in works of literature, film, and art, and prompting profound reflections on the interaction between humans and machines.
The Three Laws of Robotics were devised by the science fiction author Isaac Asimov and first appeared in his story “Runaround” in 1942.[6] The laws are:
- A robot may not injure a human being or, through inaction, allow a human being to come to harm.
- A robot must obey the orders given it by human beings except where such orders would conflict with the First Law.
- A robot must protect its own existence as long as such protection does not conflict with the First or Second Law.
These laws were designed as a set of moral guidelines that intelligent robots would follow, to reassure humans of their safety and control over the machines.
Mid to Late 20th Century
George Devol, an important figure in robotics history, invented the first programmable robot, which became the prototype for industrial robots.[7] In the mid-20th century, digital technology began to integrate with robotics. The first digitally operated and programmable robot, Unimate, was installed in 1961 to lift hot pieces of metal from a die casting machine and stack them. This marked the onset of the era of industrial robotics.
In the late 1970s and early 1980s, the development of microprocessors significantly reduced the cost of computers, making it feasible to create smaller, more intelligent robots. Robots became more common in manufacturing and industry, and the exploration of AI and machine learning set the stage for the next generation of robotics.
21st Century
The dawn of the 21st century has seen a rapid expansion in the capabilities and applications of robots. With technological advances in sensor technology, computing power, AI, and data science, robots are no longer confined to industrial environments. From autonomous vehicles to companion robots, from surgical robots to drones, robotics has permeated many aspects of daily life.
It is challenging to predict the exact trajectory of robotics, one thing is clear: we are on the cusp of a new era in which robots will be capable of complex decision-making and will likely play an even larger role in our lives, both at work and at home. As the field continues to grow and evolve, we can look forward to even more innovative and sophisticated robotic technologies in the future.
Types of Robots
Robots, fundamental to numerous industries, can be classified in various ways, including by their design, application, control method, and level of autonomy. However, a fundamental classification often used divides robots into three main categories: Industrial Robots, Service Robots, and Collaborative Robots (Cobots). These categories encompass robots’ wide range of applications, from manufacturing to personal service to cooperative tasks.
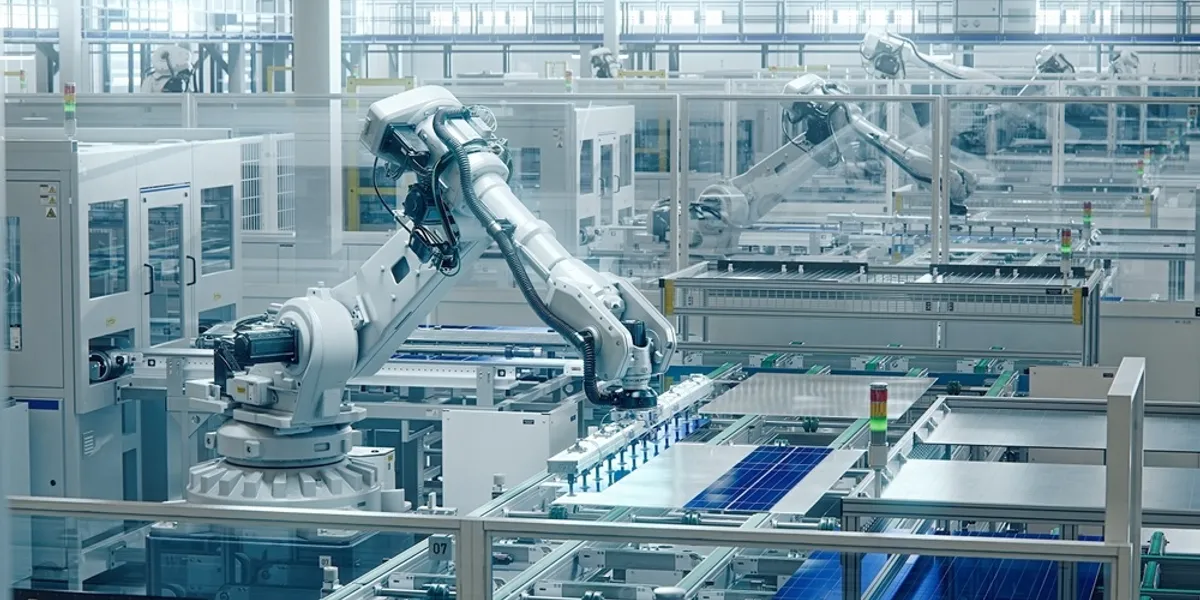
Industrial Robots
Industrial robots are automated, programmable machines designed to perform repetitive tasks with high precision and speed. These machines are built for industrial applications, often characterized by their high payload, reach, and precision capabilities. Industrial robots can thrive in challenging conditions, as they are engineered with durability and repeatability in mind. A key aspect of industrial robots is their ability to operate in an autonomous or semi-autonomous fashion, employing advanced control systems, sensor integration, and sophisticated programming. This allows them to perform a variety of complex tasks consistently and accurately.
There are several types of industrial robots, each with its unique characteristics and applications. Some common types include:
Articulated Robots: These robots have rotary joints that allow for a wide range of motion. Articulated robots are versatile and can be used in various applications, such as pick-and-place tasks, welding, and assembly. They typically have between four and six degrees of freedom, allowing them to move in multiple directions and perform complex tasks.
Cartesian Robots: Also known as gantry robots, Cartesian robots move linearly along the X, Y, and Z axes. They are well-suited for tasks that require precise positioning, such as CNC machining, 3D printing, and material handling. Cartesian robots are known for their high accuracy and repeatability, making them ideal for applications that demand precision.
SCARA Robots: SCARA stands for Selective Compliance Assembly Robot Arm. These robots have a cylindrical work envelope and are designed for high-speed assembly tasks. SCARA robots are known for their fast cycle times and high precision, making them ideal for applications such as electronics assembly, pick-and-place tasks, and packaging.
Delta Robots: Delta robots, also known as parallel robots, have a unique design with three arms connected to a single base. They are known for their high speed and precision, making them suitable for tasks such as pick-and-place, packaging, and sorting. Delta robots are often used in the food and pharmaceutical industries due to their ability to handle delicate items without causing damage.
Further reading: 7 Types of Industrial Robots: Advantages, Disadvantages, Applications, and More
Industrial robots offer several advantages over human labor, including increased productivity, improved quality, and reduced labor costs. They can work continuously without breaks, leading to higher output and efficiency. Additionally, industrial robots can perform tasks in hazardous environments, reducing the risk of injury to human beings. However, the initial investment in industrial robots can be high, and their programming and maintenance require skilled personnel. Eminent organizations like NASA also utilize industrial robots for tasks like assembling spacecraft and conducting scientific experiments.
Service Robots
Service robots are designed to assist humans in various tasks, often outside of traditional industrial settings. These robots can be found in a wide range of industries, including healthcare, hospitality, retail, and logistics. Service robots are typically designed to be more versatile and adaptable than industrial robots, as they often need to interact with humans and navigate complex environments.
One example of a service robot is the autonomous mobile robot (AMR), which is commonly used in warehouses and distribution centers for material handling and transportation. AMRs use advanced sensors, such as LiDAR and cameras, to navigate their environment and avoid obstacles. They can be programmed to follow specific routes or dynamically plan their paths based on real-time data. AMRs can significantly improve efficiency in logistics operations by reducing the need for manual labor and minimizing the risk of accidents. Software robots, or bots, are also a type of service robot, often used for robotic process automation for automating repetitive tasks in various industries.
Healthcare service robots are another prominent category, designed to assist medical professionals and patients in various tasks. For instance, surgical robots, such as the da Vinci Surgical System, enable surgeons to perform minimally invasive procedures with greater precision and control. These robots use advanced computer vision and haptic feedback systems to provide surgeons with a high degree of dexterity and accuracy during operations. Another example is the rehabilitation robot, which can assist patients in performing physical therapy exercises, helping them regain strength and mobility after injuries or surgeries.
In the hospitality industry, service robots are being deployed to enhance customer experiences and streamline operations. For example, robotic concierges can provide guests with information, directions, and assistance, while robotic room service can deliver food and beverages to guest rooms. These robots often use advanced natural language processing and computer vision technologies to interact with guests and navigate hotel environments.
Collaborative Robots
Collaborative robots, or cobots, are designed to work alongside humans in shared workspaces, often without the need for physical barriers or safety cages. Cobots are equipped with advanced safety features, such as force and torque sensors, that allow them to detect and respond to unexpected contact with humans or objects. This enables them to operate safely in close proximity to human workers, enhancing productivity and efficiency while reducing the risk of accidents.
Cobots are typically more compact and lightweight than traditional industrial robots, making them easier to integrate into existing workspaces. They are also designed to be user-friendly, with intuitive programming interfaces that allow workers to quickly learn and adapt to their operation. This reduces the need for specialized training and makes cobots accessible to a wider range of users.
Further reading: Cobots vs Robots: Understanding the Key Differences and Applications
One common application of cobots is assisted assembly, where the robot and human worker collaborate on tasks such as part insertion, screwdriving, or gluing. The cobot can handle repetitive or physically demanding tasks, while the human worker focuses on tasks that require more dexterity, judgment, or creativity. This combination of human and robot capabilities can lead to improved productivity and reduced worker fatigue.
Another application of cobots is in machine tending, where the robot loads and unloads parts from a machine, such as a CNC mill or injection molding machine. Cobots can be programmed to perform these tasks with high precision and consistency, freeing up human workers to focus on more complex tasks, such as quality control or process optimization.
Cobots are also being used in pick-and-place applications, where they can quickly and accurately move items from one location to another. This can be particularly useful in industries such as electronics manufacturing, where precision and speed are critical for maintaining high production volumes and quality standards.
As technology continues to advance, the capabilities of cobots are expected to expand, enabling them to take on more complex tasks and work even more closely with human workers. This collaboration between humans and robots has the potential to revolutionize the way work is done in various industries, leading to increased efficiency, productivity, and worker satisfaction.
Robot Components
The fundamental components of a robot are integral to its operation. These key elements, working in unison, allow robots to navigate, process information, and perform tasks. This section explains some of the key components of a robotic system.
Mechanical Structure
The mechanical structure of a robot is a critical aspect of its design, as it determines the robot’s range of motion, stability, and overall performance. The structure is typically composed of a series of interconnected links and joints, which form the robot’s kinematic chain. This chain allows the robot to move and manipulate objects in its environment.
There are two primary kinds of robot structures: serial and parallel.
Serial robot structures consist of a series of links connected end-to-end, with each link joined by a single joint. This configuration allows for a wide range of motion, as each joint contributes to the robot’s overall degrees of freedom. Serial structures are commonly used in articulated robots, such as industrial robot arms and humanoid robots. One of the main advantages of serial structures is their flexibility, as they can be easily reconfigured to perform a variety of tasks. However, they can also be less rigid and more susceptible to vibrations, which may affect their precision and accuracy.
Parallel robot structures feature multiple kinematic chains that connect the robot’s base to its end effector. These chains work in parallel, distributing the load and providing increased rigidity and stability. Parallel structures are often used in high-precision applications, such as delta robots and hexapods, where accuracy and repeatability are crucial. One of the main benefits of parallel structures is their high stiffness, which allows for greater precision and faster response times. However, they can be more complex to design and control, as the motion of each chain must be carefully coordinated.
When designing a robot’s mechanical structure, engineers must consider factors such as the robot’s intended application, payload capacity, workspace requirements, and desired level of precision. By selecting the appropriate structure and materials, engineers can optimize the robot’s performance for its specific use case, ensuring that it can effectively carry out its tasks while minimizing energy consumption and wear on its components.
Actuators
Actuators are essential components of robots, responsible for converting various forms of energy into mechanical motion. They enable robots to move their joints, manipulate objects, and perform tasks in their environment. There are several types of actuators used in robotics, each with its unique characteristics and applications.
Electric motors
Electric motors are the most common type of actuator used in robotics, due to their high efficiency, precision, and ease of control. Electric motors convert electrical energy into mechanical motion through the interaction of magnetic fields. There are various types of electric motors used in robotics, including:
- DC motors: Direct current (DC) motors are widely used in robotics for their simplicity and ease of control. They provide a continuous rotation and can be easily adjusted for speed and torque. However, DC motors may require more maintenance due to their brushes and commutators, which can wear out over time.
- Brushless DC motors: Brushless DC motors offer similar performance to traditional DC motors but without the need for brushes and commutators. This results in lower maintenance requirements and longer lifespans. Brushless DC motors are often used in applications that require high speed, precision, and efficiency.
- Stepper motors: Stepper motors are a type of electric motor that provides precise incremental movements, making them ideal for applications that require accurate positioning and control. They are commonly used in robots for tasks such as pick-and-place operations and CNC machining.
Hydraulic actuators
Hydraulic actuators use pressurized fluid to generate motion and are often employed in robots that require high force and power. Hydraulic systems can provide high torque and precise control, making them suitable for applications such as heavy lifting and manipulation. However, hydraulic actuators can be more complex and require additional components, such as pumps, valves, and fluid reservoirs, which can increase the overall size and weight of the robot.
Pneumatic actuators
Pneumatic actuators use compressed air to generate motion and are typically used in robots that require fast, lightweight, and low-cost solutions. Pneumatic systems can provide rapid actuation and are often used in applications such as pick-and-place operations and robotic grippers. However, pneumatic actuators may have lower precision and force capabilities compared to electric or hydraulic systems.
When selecting an actuator for a robotic system, engineers must consider factors such as the required force, speed, precision, and energy efficiency. By choosing the appropriate actuator type and configuration, engineers can optimize the robot’s performance for its specific application, ensuring that it can effectively carry out its tasks while minimizing energy consumption and wear on its components.
Sensors
Sensors play a crucial role in robotics, as they provide the robot with information about its environment and its own internal state. This data is essential for the robot to make decisions, navigate its surroundings, and interact with objects and humans. There are various types of sensors used in robots, each designed to measure specific properties or detect particular events.
Vision sensors
Vision sensors are among the most common types of sensors used in robotics. These sensors, which include cameras and LiDAR systems, capture visual information about the robot’s environment. Vision sensors can be used for tasks such as object recognition, obstacle detection, and navigation. For example, autonomous mobile robots often rely on cameras and LiDAR to build a map of their surroundings and plan their paths accordingly.
Force and torque sensors
Force and torque sensors measure the forces and torques applied to a robot’s joints or end effector. These sensors are particularly important in applications that require precise force control, such as assembly or material handling. By monitoring the forces and torques exerted by the robot, the control system can adjust its movements to ensure that the desired force is applied without causing damage to the robot or the objects it interacts with.
Proximity sensors
Proximity sensors detect the presence of objects or obstacles near the robot. These sensors can be based on various technologies, such as infrared, ultrasonic, or capacitive sensing. Proximity sensors are often used in collision avoidance systems, where they help the robot navigate its environment without coming into contact with obstacles or other robots.
Tactile sensors
Tactile sensors provide information about the robot’s contact with objects or surfaces. These sensors can be used to detect the presence of an object, measure the applied force, or determine the object’s properties, such as its texture or temperature. Tactile sensors are particularly useful in applications that require delicate manipulation, such as grasping fragile items or performing tasks that involve human-robot interaction.
Inertial sensors
Inertial sensors, such as accelerometers and gyroscopes, measure the robot’s linear and angular motion. These sensors are essential for tasks that require precise control of the robot’s movements, such as balancing or navigating uneven terrain. Inertial sensors can also be used to estimate the robot’s position and orientation when other sources of information, such as vision sensors, are not available.
By integrating various types of sensors into a robot’s design, engineers can create systems that are capable of perceiving and responding to their environment in a more intelligent and adaptive manner. This enables robots to perform complex tasks and interact with humans and objects in a safe and efficient way.
End Effectors
End effectors, often referred to as the “hand” of the robot, are the devices that interact directly with the environment. They are typically attached to the end of the robot’s mechanical structure and are responsible for performing the task for which the robot is designed. The choice of end effector depends heavily on the specific application of the robot.
There are several types of end effectors used in robotics, each serving a unique function:
- Grippers: These are one of the most common types of end effectors and are used to grasp, hold, and release objects. Grippers can come in many forms, including two-fingered (or more) designs, vacuum grippers, and magnet grippers, each suited to handle different types and shapes of objects.
- Tools: Robots can be equipped with various tools as end effectors, such as drills, welders, or paint sprayers, allowing them to perform specific tasks. The tool chosen depends on the robot’s purpose, such as assembly, machining, painting, etc.
- Sensors: In some applications, sensors can be considered as end effectors. For example, a robot may have a camera or a probe at its end to collect data from its environment.
- Specialized end effectors: In some cases, robots may have specialized end effectors designed for unique tasks. For instance, surgical robots have very precise, miniaturized instruments, while a robot designed for bomb disposal may have a controlled explosion device.
Further reading: What are End Effectors in Robotics? Types of End Effectors, Applications, Future
Choosing the right end effector is critical to the successful completion of the robot’s task. Factors such as the task’s nature, the environment, the properties of the objects to be manipulated, and safety considerations all play a role in determining the most suitable end effector.
Power Systems
Power systems are crucial for any robotic system. They provide the energy required for the robot to operate and perform its tasks. The choice of power system largely depends on the robot’s intended application, its energy requirements, and the duration of its operation. Some common power sources include:
- Batteries: Most robots are powered by batteries, particularly those designed for mobility or remote operation. Batteries can provide a reliable source of energy for a certain period, but they need to be recharged or replaced regularly.
- Electric power: Some robots, particularly stationary ones like industrial robots, can be powered directly by electricity from a power grid. This option provides a continuous power supply, eliminating the need for recharging or replacing batteries.
- Solar power: For outdoor robots or those operating in environments with ample sunlight, solar panels can be an efficient power source. Solar-powered robots can operate for extended periods during daylight hours, reducing the need for battery replacement or recharging.
- Fuel cells: Some advanced robots use fuel cells, which convert chemical energy into electricity. Fuel cells can provide a high energy density and a long operation time, making them suitable for applications that require prolonged or intense activity.
- Energy harvesting: Some robots can harvest energy from their environment, such as through solar power, kinetic energy, or thermal energy. This approach can extend the robot’s operation time and reduce its reliance on batteries or external power sources.
When designing a robot’s power system, engineers need to balance factors such as energy density, power output, weight, size, and cost. The ideal power system can provide sufficient energy for the robot to perform its tasks effectively, while minimizing its size, weight, and operational costs.
The complexity and diversity of robot components underscore the interdisciplinary nature of robotics, which combines elements of mechanical engineering, electrical engineering, computer science, and many other fields. Understanding these components and how they interact is key to designing and building effective robotic systems.
Robot Control Systems
Robot Control Systems, often considered as the ‘brains’ of the robot, are responsible for overseeing all its operations. These systems ingest data from various sensors, interpret this data, and subsequently generate appropriate responses. They can be broadly classified into different categories based on their operating methods and feedback mechanisms, each suited to specific tasks and scenarios. Thus, the nature of the control system significantly influences the robot’s overall performance and its ability to interact with its environment.
Open-loop Control
Open-loop control systems are a type of robot control system in which the robot’s actions are determined solely by a predefined sequence of commands, without any feedback from the robot’s sensors or environment. In open-loop systems, the controller sends signals to the actuators, which execute the desired motion based on the input commands. Since there is no feedback mechanism, the controller does not adjust its output based on the robot’s actual performance or external factors.
One of the main advantages of open-loop control systems is their simplicity, as they do not require complex feedback algorithms or sensor integration. This can make them easier to implement and more cost-effective for certain applications. Open-loop systems can also provide predictable and consistent performance, as the robot’s actions are determined solely by the input commands.
However, open-loop control systems have several limitations. Since there is no feedback mechanism, the controller cannot compensate for errors or disturbances in the robot’s motion, such as friction, external forces, or changes in the robot’s environment. This can result in reduced accuracy and repeatability, particularly in applications that require precise positioning or force control. Additionally, open-loop systems may be less adaptable to changing conditions or tasks, as the controller cannot adjust its output based on real-time information from the robot’s sensors or environment.
In summary, open-loop control systems can be a suitable choice for certain robotic applications where simplicity and predictability are more important than adaptability and precision. However, for applications that require high accuracy, repeatability, or adaptability, closed-loop control systems may be a more appropriate choice.
Closed-loop Control
Closed-loop control systems are a type of robot control system that incorporates feedback from the robot’s sensors or environment to adjust its actions in real-time. In closed-loop systems, the controller continuously monitors the robot’s performance and compares it to the desired output or setpoint. If there is a discrepancy between the actual performance and the setpoint, the controller adjusts its output to correct the error and bring the robot’s performance closer to the desired outcome.
One of the main benefits of closed-loop control systems is their ability to provide more accurate and consistent performance compared to open-loop systems. By incorporating feedback from the robot’s sensors or environment, the controller can compensate for errors or disturbances in the robot’s motion, such as friction, external forces, or changes in the robot’s environment. This can result in improved accuracy, repeatability, and adaptability, particularly in applications that require precise positioning or force control.
Closed-loop control systems can also provide better performance in dynamic or uncertain environments, as the controller can adjust its output based on real-time information from the robot’s sensors or environment. This can enable the robot to adapt to changing conditions or tasks more effectively than open-loop systems, which rely solely on predefined input commands.
However, closed-loop control systems can be more complex and computationally demanding than open-loop systems, as they require the integration of sensors, feedback algorithms, and control strategies. This can make them more challenging to implement and may require more advanced hardware and software resources.
In summary, closed-loop control systems offer several advantages over open-loop systems, including improved accuracy, repeatability, and adaptability. While they can be more complex and computationally demanding, closed-loop systems are often a more appropriate choice for applications that require high precision, adaptability, or robust performance in dynamic or uncertain environments.
Adaptive Control
Adaptive control is an advanced type of closed-loop control system that adjusts its parameters and control strategies in real-time based on the robot’s performance and environmental conditions. Adaptive control systems are designed to cope with uncertainties, non-linearities, and time-varying dynamics in the robot’s behavior or environment, making them particularly well-suited for applications where the robot’s operating conditions may change over time or where the robot’s model is not well-known.
One of the key features of adaptive control systems is their ability to learn and adapt their control strategies based on the robot’s performance and the observed environmental conditions. This can be achieved through various techniques, such as model reference adaptive control (MRAC), self-tuning regulators (STR), or adaptive sliding mode control. These techniques typically involve the use of online parameter estimation algorithms, which update the controller’s parameters based on the observed performance and the desired output.
Adaptive control systems can offer several advantages over traditional closed-loop control systems, including:
- Improved performance in uncertain or changing environments: Adaptive control systems can adjust their control strategies and parameters in real-time to cope with uncertainties or changes in the robot’s behavior or environment. This can result in better performance and robustness compared to traditional closed-loop systems, which may rely on fixed control strategies and parameters.
- Reduced reliance on accurate robot models: Adaptive control systems can learn and adapt their control strategies based on the robot’s actual performance, reducing the need for accurate robot models or prior knowledge of the robot’s dynamics. This can be particularly beneficial in applications where the robot’s model is not well-known or may change over time, such as robots with flexible structures or robots operating in unstructured environments.
- Increased adaptability to new tasks or conditions: Adaptive control systems can learn and adapt their control strategies based on the robot’s performance in different tasks or conditions, making them more versatile and capable of handling a wider range of applications.
However, adaptive control systems can also be more complex and computationally demanding than traditional closed-loop systems, as they require the integration of online parameter estimation algorithms and adaptive control strategies. This can make them more challenging to implement and may require more advanced hardware and software resources.
In summary, adaptive control systems offer several advantages over traditional closed-loop systems, including improved performance in uncertain or changing environments, reduced reliance on accurate robot models, and increased adaptability to new tasks or conditions. While they can be more complex and computationally demanding, adaptive control systems can provide significant benefits in applications that require high levels of adaptability, robustness, or performance in dynamic or uncertain environments.
Further reading: Mastering Distributed Control Systems: A Comprehensive Guide to DCS Architecture, Components, and Applications
Robot Programming
Another critical aspect is Robot Programming, the process that brings a robot to life by defining its behaviors and responses. It involves developing a set of instructions or code that the control system uses to perform tasks. The programming can range from simple, pre-programmed instructions for repetitive tasks to complex algorithms using AI and machine learning for more advanced and adaptable behaviors. Robot computer programming not only determines what tasks a robot can perform but also how efficiently and effectively it can execute them. Various apps have been developed to help program and control robots, making robotics more accessible to the general public. Let’s now discuss some common programming techniques.
Teach Pendant Programming
Teach pendant programming is a widely used method for programming industrial robots. A teach pendant is a handheld device that allows operators to control and program the robot directly from the shop floor. The teach pendant typically features a user-friendly interface with buttons, a joystick, or a touchscreen, enabling operators to interact with the robot and input commands.
The process of teach pendant programming involves manually guiding the robot through its desired motions, recording the positions and orientations of the robot’s joints at each step. This is often referred to as “teaching by demonstration” or “lead-through programming.” Once the robot’s movements have been recorded, the operator can fine-tune the program by adjusting parameters such as speed, acceleration, and dwell time.
One of the main advantages of teach pendant programming is its simplicity and ease of use. Operators do not need extensive programming knowledge to create robot programs, making it accessible to a wide range of users. This can be particularly beneficial in small and medium-sized enterprises, where specialized programming expertise may be limited.
However, teach pendant programming also has some limitations. The process can be time-consuming, as the operator must manually guide the robot through each step of its motion. This can be especially challenging for complex tasks or large workspaces, where the robot must move through many positions and orientations. Additionally, the accuracy and repeatability of teach pendant programming may be limited by the operator’s ability to guide the robot precisely, which can be affected by factors such as fatigue, skill level, and environmental conditions.
Despite these limitations, teach pendant programming remains a popular method for programming industrial robots due to its simplicity and accessibility. By providing operators with a user-friendly interface and direct control over the robot’s movements, teach pendant programming enables a wide range of users to create and modify robot programs quickly and efficiently.
Offline Programming
Offline programming, also known as simulation-based programming or virtual programming, is a method of creating robot programs using computer software rather than directly interacting with the physical robot. In offline programming, the robot’s movements and tasks are defined and simulated in a virtual environment, allowing the programmer to visualize and optimize the robot’s performance before implementing the program on the actual robot.
The process of offline programming typically involves the following steps:
- Creating a virtual model of the robot and its environment: The programmer creates a digital representation of the robot, its workspace, and any relevant objects or fixtures. This model can be created using computer-aided design (CAD) software or imported from existing CAD files.
- Defining the robot’s tasks and movements: The programmer specifies the robot’s desired motions and actions using a programming language or graphical interface. This can include defining the robot’s path, setting waypoints, and specifying the sequence of tasks to be performed.
- Simulating the robot’s performance: The offline programming software simulates the robot’s movements and tasks in the virtual environment, allowing the programmer to visualize the robot’s performance and identify any potential issues, such as collisions, singularities, or excessive joint velocities.
- Optimizing the robot’s program: Based on the simulation results, the programmer can fine-tune the robot’s program to improve its performance, such as by adjusting the robot’s path, speed, or acceleration profiles.
- Transferring the program to the physical robot: Once the program has been optimized in the virtual environment, it can be transferred to the actual robot and executed on the shop floor.
Offline programming offers several advantages over traditional teach pendant programming. By simulating the robot’s performance in a virtual environment, programmers can identify and resolve potential issues before implementing the program on the physical robot, reducing the risk of errors and minimizing downtime. Offline programming also allows for more complex and precise robot programs to be created, as the programmer can use advanced algorithms and optimization techniques to improve the robot’s performance.
However, offline programming can also be more complex and time-consuming than teach pendant programming, as it requires the creation of accurate virtual models and the use of specialized software tools. Additionally, the accuracy of offline programming depends on the fidelity of the virtual models and the quality of the simulation algorithms, which may not always perfectly match the robot’s actual performance in the real world.
Despite these challenges, offline programming is becoming increasingly popular in robotics, as it enables more efficient and precise robot programming, particularly for complex tasks or large-scale automation projects. By leveraging advanced simulation and optimization techniques, offline programming can help improve the performance and reliability of robotic systems, ultimately leading to increased productivity and cost savings.
Robot Operating System (ROS)
The Robot Operating System (ROS) is an open-source framework for developing and controlling robots. ROS provides a flexible and modular platform that simplifies the process of creating complex robotic systems by offering a wide range of tools, libraries, and software packages. It is designed to promote collaboration and code reuse within the robotics community, enabling developers to build upon existing solutions and share their work with others.
One of the key features of ROS is its distributed architecture, which allows multiple processes, or “nodes,” to communicate with each other over a network. This enables developers to create modular systems where different components, such as sensors, actuators, and algorithms, can run independently and exchange information as needed. This distributed approach can improve the scalability and robustness of robotic systems, as individual nodes can be added, removed, or updated without affecting the overall system.
ROS also provides a wide range of tools and libraries for common robotic tasks, such as perception, planning, control, and simulation. These tools can help developers to quickly prototype and test their robotic systems, reducing the time and effort required to develop custom solutions from scratch. Some examples of ROS packages include:
- Navigation: ROS offers a variety of tools for robot navigation, such as the popular “move_base” package, which provides path planning, obstacle avoidance, and localization capabilities.
- Perception: ROS provides libraries for processing sensor data, such as point cloud processing with the Point Cloud Library (PCL) and computer vision with OpenCV.
- Manipulation: ROS offers packages for controlling robotic arms and grippers, such as MoveIt! for motion planning and the Grasp Planning Library for grasp generation.
- Simulation: ROS integrates with popular robot simulators, such as Gazebo and V-REP, allowing developers to test their robotic systems in virtual environments before deploying them in the real world.
By providing a flexible and modular platform for robot development, ROS has become a popular choice among researchers, developers, and companies working on a wide range of robotic applications. Its open-source nature and active community support make it an attractive option for those looking to develop advanced robotic systems quickly and efficiently.
Robotics Applications
Capping off with Robotics Applications, this section highlights some of the myriad fields where robots serve. From manufacturing to healthcare, and agriculture to domestic tasks, the use of robots is vast and ever-expanding. Each application tailors the robot’s design and programming, thus reflecting the diverse potential of robotics in the future.
Manufacturing
Robotics has revolutionized the manufacturing industry by automating various processes, leading to increased productivity, improved quality, and reduced labor costs. Robots are used in a wide range of manufacturing applications, from assembly and material handling to welding and painting. By performing tasks with high precision, speed, and consistency, robots can help manufacturers achieve greater efficiency and competitiveness in the global market. Here are some common tasks in the industrial sector where robots are frequently deployed:
- Assembly: Robots are widely used in assembly lines, where they can perform tasks such as part insertion, screwdriving, and gluing. By automating these repetitive and physically demanding tasks, robots can help reduce worker fatigue and the risk of injury, while also improving the overall quality and consistency of the assembled products. For example, in the automotive industry, robots are used to assemble various components, such as engines, transmissions, and body panels, with high precision and speed.
- Material handling: Material handling is another common application of robotics in manufacturing. Robots can be used to transport raw materials, work-in-progress, and finished goods between different stages of the production process. By automating material handling tasks, robots can help manufacturers optimize their production workflows, reduce the risk of accidents, and minimize the need for manual labor. Examples of material handling robots include autonomous mobile robots (AMRs), which can navigate complex factory environments to transport materials, and robotic arms, which can be used to load and unload parts from machines or conveyor systems.
- Welding: Robotic welding systems are widely used in the manufacturing industry to perform tasks such as arc welding, spot welding, and laser welding. By automating the welding process, robots can help manufacturers achieve consistent and high-quality welds, while also reducing the need for skilled welders and minimizing the risk of accidents. Robotic welding systems typically consist of a robotic arm equipped with a welding torch, a controller, and a vision system, which enables the robot to accurately locate and align the welding joints.
- Painting: Robotic painting systems are used in various industries, such as automotive, aerospace, and consumer electronics, to apply paint or coatings to products with high precision and consistency. By automating the painting process, robots can help manufacturers achieve uniform and high-quality finishes, while also reducing the risk of exposure to hazardous materials and minimizing the need for manual labor. Robotic painting systems typically consist of a robotic arm equipped with a spray gun, a controller, and a vision system, which enables the robot to accurately locate and align the spray pattern on the product’s surface.
Further reading: Robots in the Manufacturing Industry: Types and Applications
Healthcare
Robotics has made significant advancements in the healthcare industry, improving patient outcomes, reducing the risk of complications, and enhancing the overall efficiency of medical procedures. The integration of robotics in healthcare has led to the development of various applications, such as surgical robots, rehabilitation robots, and telemedicine systems.
Surgical robots are designed to assist surgeons in performing minimally invasive procedures with greater precision and control. These robots typically consist of a console where the surgeon operates the robot, and a robotic arm that holds and manipulates the surgical instruments. One of the most well-known surgical robots is the da Vinci Surgical System, which has been used in millions of procedures worldwide. The da Vinci system uses advanced computer vision and haptic feedback technologies to provide surgeons with a high degree of dexterity and accuracy during operations. By enabling more precise and controlled movements, surgical robots can reduce the risk of complications, minimize scarring, and shorten patient recovery times.
Rehabilitation robots are designed to assist patients in performing physical therapy exercises, helping them regain strength and mobility after injuries or surgeries. These robots can provide targeted, repetitive, and controlled movements that are tailored to the patient’s specific needs and abilities. For example, the Lokomat system is a robotic gait trainer that supports patients during treadmill walking, providing adjustable levels of body weight support and guidance to promote proper gait patterns. Rehabilitation robots can also be used to monitor patient progress and provide real-time feedback, enabling therapists to adjust treatment plans and optimize patient outcomes.
Telemedicine systems leverage robotics and communication technologies to provide remote healthcare services, particularly in areas with limited access to medical professionals. Telemedicine robots can be used for remote consultations, diagnostics, and even surgical procedures, allowing patients to receive care without the need for travel. For example, the InTouch Health RP-VITA robot is a telepresence robot that enables physicians to remotely interact with patients and medical staff, providing real-time video and audio communication. Telemedicine systems can help improve access to healthcare services, reduce healthcare costs, and enhance the overall quality of care.
Agriculture
Robotics has the potential to revolutionize the agriculture industry by automating various tasks and improving efficiency, productivity, and sustainability. The use of robots in agriculture can help address challenges such as labor shortages, rising production costs, and the need for more sustainable farming practices. Some examples of robotic applications in agriculture include:
Crop monitoring and data collection: Agricultural robots equipped with sensors and cameras can be used to monitor crop health, growth, and environmental conditions. These robots can collect data on factors such as soil moisture, nutrient levels, and pest infestations, allowing farmers to make more informed decisions about irrigation, fertilization, and pest control. By providing real-time, accurate information about crop conditions, robotic systems can help farmers optimize their resource use and improve crop yields.
Precision agriculture: Precision agriculture involves the use of technology to optimize farming practices at a granular level, such as applying fertilizers or pesticides only where they are needed. Robotic systems can play a crucial role in precision agriculture by providing accurate, high-resolution data on crop conditions and enabling targeted interventions. For example, robots equipped with vision systems and sprayers can identify and treat individual weeds or pests, reducing the overall use of chemicals and minimizing their environmental impact.
Autonomous machinery: Autonomous tractors, harvesters, and other agricultural machinery can perform tasks such as plowing, planting, and harvesting without the need for human operators. These machines can be equipped with advanced sensors, GPS systems, and control algorithms that allow them to navigate fields, avoid obstacles, and perform tasks with high precision and efficiency. By automating these labor-intensive tasks, autonomous machinery can help reduce labor costs, increase productivity, and improve worker safety.
Harvesting robots: Robotic systems can be designed to perform selective harvesting tasks, such as picking fruits or vegetables that meet specific quality criteria. These robots can use computer vision and machine learning algorithms to identify ripe produce, determine its quality, and perform the harvesting process without damaging the crop or surrounding plants. By automating the harvesting process, robots can help address labor shortages, reduce the risk of crop loss due to spoilage, and improve overall productivity.
Conclusion
In this article, we have explored various aspects of robotics, focusing on the engineering principles and applications. We discussed different types of robots, their components, control systems, programming methods, and applications in various industries. We also examined future trends in robotics, such as the integration of AI and machine learning, advancements in human-robot interaction, and the development of swarm robotics.
As technology continues to advance, the capabilities of robots are expected to expand, enabling them to take on more complex tasks and work alongside humans in increasingly sophisticated ways. This progress in robotics has the potential to revolutionize industries and improve the overall quality of life for people around the world.
While the image of robots in pop culture can range from friendly helpers like R2-D2 to menacing machines like the Terminator, the real-world applications of robots are far more nuanced and focused on problem-solving and task automation.
Frequently Asked Questions (FAQs)
Q: What is the difference between industrial robots and service robots?
A: Industrial robots are designed for use in manufacturing processes, such as assembly, welding, and material handling. They are typically characterized by their high precision, speed, and payload capacity. Service robots, on the other hand, are designed to assist humans in various tasks outside of traditional industrial settings, such as healthcare, hospitality, and logistics.
Q: What are the main components of a robot?
A: The main components of a robot include its mechanical structure, actuators, sensors, end effectors, power system, and control system. The mechanical structure determines the robot’s range of motion and stability, while actuators convert energy into mechanical motion. Sensors provide the robot with information about its environment and internal state, and the control system processes this information to determine the robot’s actions.
Q: What is the difference between open-loop and closed-loop control systems?
A: Open-loop control systems determine the robot’s actions based solely on a predefined sequence of commands, without any feedback from the robot’s sensors or environment. Closed-loop control systems, on the other hand, incorporate feedback from the robot’s sensors or environment to adjust its actions in real-time, resulting in more accurate and consistent performance.
Q: What is the Robot Operating System (ROS)?
A: The Robot Operating System (ROS) is an open-source framework for developing and controlling robots. It provides a flexible and modular platform that simplifies the process of creating complex robotic systems by offering a wide range of tools, libraries, and software packages. ROS is designed to promote collaboration and code reuse within the robotics community, enabling developers to build upon existing solutions and share their work with others.
Q: What are some future trends in robotics?
A: Some future trends in robotics include the integration of artificial intelligence and machine learning, advancements in human-robot interaction, and the development of swarm robotics. These trends have the potential to significantly expand the capabilities of robots, enabling them to take on more complex tasks and work more closely with humans in a variety of applications.
References
[1] Nof SY, editor. Handbook of industrial robotics. 2nd ed. New York: John Wiley & Sons; 1999. Available from: https://onlinelibrary.wiley.com/doi/book/10.1002/9780470172506
[2] Siciliano B, Khatib O, editors. Springer handbook of robotics. 2nd ed. Berlin: Springer; 2016. Available from: https://link.springer.com/book/10.1007/978-3-319-32552-1
[3] The Industrial Revolution (1750–1900), Britannica, Online, Available from: https://www.britannica.com/technology/history-of-technology/The-Industrial-Revolution-1750-1900
[4] Karel Čapek. R.U.R. (Rossum’s Universal Robots). Aventinum, Prague, 1920. Available from: R.U.R. (Rossum’s Universal Robots) : Karel Čapek : Free Download, Borrow, and Streaming : Internet Archive
[5] Allison Marsh, ‘Elektro the Moto-Man Had the Biggest Brain at the 1939 World’s Fair This voice-controlled robot could walk, talk, and smoke, and it captivated crowds’, IEEE Spectrum, [Online], Available from: https://spectrum.ieee.org/elektro-the-motoman-had-the-biggest-brain-at-the-1939-worlds-fair
[6] Britannica, The Editors of Encyclopaedia. “three laws of robotics”. Encyclopedia Britannica, 17 May. 2022, https://www.britannica.com/topic/Three-Laws-of-Robotics
[7] The Invention of the Industrial Robot, Invent.org, [Online], Available from: https://www.invent.org/blog/inventors/George-Devol-Industrial-Robot